技术动态
康奈尔大学研发基于二氧化硅的可拉伸光纤传感器
基于二氧化硅的分布式光纤传感器(DFOS)系统已经成为检测不可扩展结构中的应变,压力,振动,加速度,温度和湿度的强大工具。但是,DFOS系统与与软机器人和可伸缩电子设备相关的大型应变不兼容。康奈尔大学华人学者Hedan Bai,Shuo Li和Robert F. Shepherd教授团队开发了一种由弹性体光导的平行组件组成的传感器,其中包含连续或离散的彩色图案。通过综合利用内部反射和吸收,可拉伸的DFOS可以区分和测量机械变形的位置,大小和模式(拉伸,弯曲或压制)。进一步展示了通过可伸缩DFOS集成的无线手套进行的多位置解耦和多模式变形解耦,该手套可以同时重新配置所有类型的手指关节动作和外部按压,而仅需一个传感器即可实时进行。刊发相关题为‘‘Stretchable distributed fiber-optic sensors’’的论文在11月《Science》上。

作者提出了一种多功能可拉伸光机械传感器,将其称为可拉伸DFOS,其灵感来自基于二氧化硅的DFOS。可拉伸的DFOS系统是具有嵌入式彩色图案的弹性光导的并行组件。作者设计了两种彩色染料图案,作为两种传统DFOS的类比:(i)连续梯度染料图案,可以获得单模变形的连续空间分辨率;(ii)离散的色块图案,可以用离散的空间分辨率测量和解耦多种变形模式。为了演示可拉伸DFOS的多功能性,该工作重点是采用离散色块图案进行设计,将其命名为可拉伸的多模态传感光导(SLIMS)。
图1 A和B显示了SLIMS的结构,该导光板由两个聚氨酯弹性体芯(一个在四个离散位置掺杂有吸收染料的染色芯和一个不带染料的透明芯)组成,该芯被有机硅包层隔开。白色发光二极管(LED)的一端耦合到染色芯。在另一端放置了两个红绿蓝(RGB)传感器芯片,一个耦合到染色的核心,一个耦合到透明的核心。光机械传感方法基于SLIMS中光传播的光路中由变形引起的几何变化。彩色染料通过吸收光的变化来提供波长选择调制。双芯结构允许沮丧的全内反射(TIR)。通过观察两个核心的色度和强度输出,可以确定变形的位置,大小和模式(图1C和视频1)。

图1 SLIMS。(A)打结的SLIMS图像。(B)SLIMS的示意图,显示了不连续的染色区域,侧线芯的设计及其与光源和颜色传感器的耦合。(C)SLIMS未变形,拉伸,弯曲和受压时的光学输出和射线图。
由于光导的横截面为毫米级,可见光(波长<700 nm)的波特性变得不重要。安装在染色芯输入上的白色LED的视角为110°,因此来自同一LED的光线也可以进入透明芯。掺杂的染料充当空间信息的颜色代码。因为染料图案的深度仅等于染色芯高的一小部分(在这种情况下为?),所以很少有光线可以以未变形的形态穿过染料。当未变形时,两个内核均具有白色输出。
当染色区域被拉伸时(射线图:见图1C,被拉伸),该区域中的光路长度增加,引起染料更多的吸收,并且输出光朝着相应的颜色变化。根据比尔-兰伯特定律,由于拉伸会增加两个核心的光路,因此两个核心的光输出强度都会降低。SLIMS的表征表明,随着任何单个染色区域的拉伸,在透明核中未观察到色度变化(图2A),而色度随增加而变化在染色芯中观察到饱和(图2D)。两个磁芯的输出强度都以对数刻度线性衰减(图2,G和J)。根据染色芯的衰减,SLIMS的应变灵敏度在150%的范围内落在2至5 dBε-1(其中ε为应变)内伸长。以0.5毫米的预应变获得了0.1毫米的分辨率(1%应变)。经发现,预拉伸可以提高传感器的分辨率,这与拉伸表征结果一致(图2J)。注意当拉伸黄绿色区域(YG)时的非线性强度响应(图2G)。
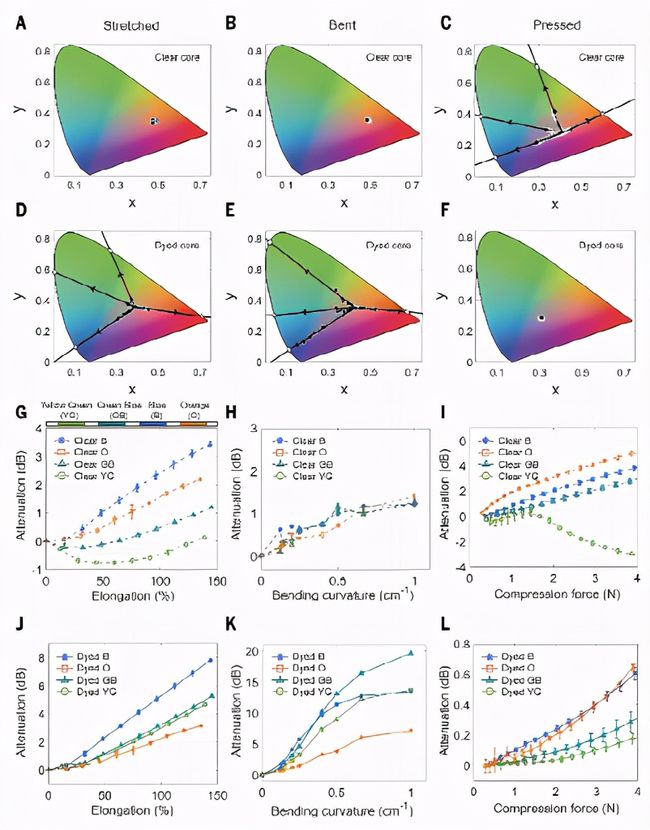
图2 SLIMS在不同变形模式下的表征。当SLIMS在染色区域中被(A)拉伸,(B)弯曲或(C)压制时,透明核的色度响应。当SLIMS被(D)拉伸,(E)弯曲或(F)压在染色区域时,染色芯的色度响应。当SLIMS被(G)拉伸,(H)弯曲或(I)压在染色区域时,透明芯的强度响应。当SLIMS被(J)拉伸,(K)弯曲或(L)压在染色区域时,染色芯的强度响应。
当染色区域处于弯曲状态(图1C,弯曲)时,染色核心中的大多数光线都可以穿过染料,从而导致输出颜色发生变化。某些不能满足临界角的彩色光线会从染色的核中逸出并进入透明的核中。但是,这些光线无法耦合到透明纤芯。因此,透明芯仍然输出白光。四个染色区域中的每一个弯曲到最大κ= 0.65 cm-1的曲率,作者测量了两个芯的色度和强度响应(图2,B,E,H和K)。色度图表明,弯曲时的颜色响应与拉伸响应类似:透明的芯输出保持白色,而染色的芯输出朝着弯曲的染料区域改变其颜色(图2,B和E)。拉伸和弯曲之间的区别可以通过比较透明芯的强度输出来实现,因为强度在弯曲中基本不受影响(图2H),而在拉伸中则显着衰减。利用染色芯的衰减(图2K),SLIMS的弯曲灵敏度计算为7至24 dB·cm-1。
作者将SLIMS集成到3D打印的柔软手套中,每个手指仅使用一个定制的SLIMS,该SLIMS可以同时捕获三个手指关节的本体感觉和外部按压的外部感觉。手指的近端,中部和远端分别被离散的红色,蓝色和绿色染料覆盖(图3A)。
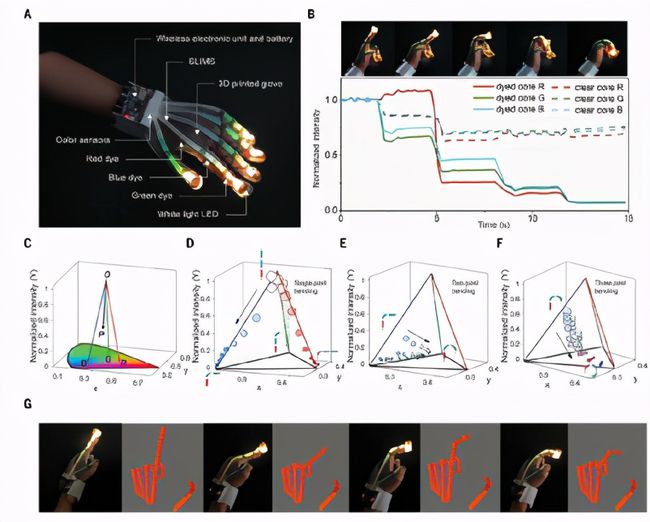
图3 SLIMS集成的软手套和多关节弯曲的本体感觉。(A)带有LED光源和电子模块的SLIMS集成式柔软手套的图像。(B)在五个不同的多接头弯曲配置下,两个芯的实时归一化强度数据。(C)用于多关节弯曲解耦的矢量和模型。(D)单接头弯曲测量。(E)两节弯曲测量。(F)三关节弯曲测量。(G)使用我们得出的矢量和模型实时重建多关节弯曲。
对于本体感受,首先从食指以不同关节角度组合弯曲时从两个核心收集RGB强度的原始数据(图3B)。当近端或中间关节只有一个弯曲(很难仅弯曲远端关节)时,染色芯会立即从白色变为红色或蓝色。可以确定该弯曲的位置和角度。但是,当多个折弯共存时,作者观察到了来自折弯区域的颜色混合。因此,需要建立一个数学模型,以消除融合在色度和强度响应方面的差异(图3C)。当仅弯曲单个关节时,首先在SLIMS中测量染色的芯响应,然后对所有三个关节重复此测量。为了分离强度和色度响应,作者将RGB强度输出转换为CIE xyY颜色空间(图3D)。图3G和视频4显示,手套实时执行三个手指关节运动的解耦和重建。
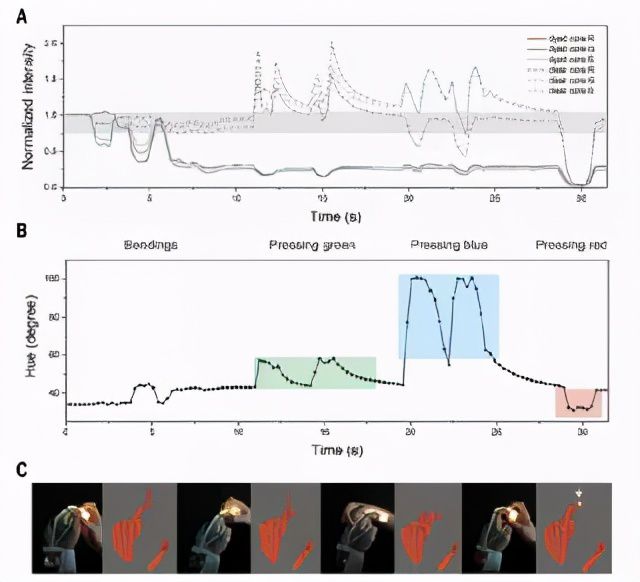
图4 SLIMS集成的软手套去耦结合了本体感受和外在感受。(A)在0到30 s内,在不同接缝上弯曲和加压时,两个纤芯的实时归一化RGB强度。压力检测的阈值由灰色框表示。(B)在0到30 s的相同变形下,从归一化RGB强度得出的实时色相值。彩色框显示确定按下的关节的色相值。(C)结合本体感觉和外部感觉的实时重建。
对于同时进行的外在感受,通过设置透明芯的归一化强度输出的阈值来实现外部按压与弯曲的解耦(图4A)。仅在弯曲(0至10 s)的情况下,强度会略有衰减;当在不同关节上多次按压SLIMS(10至30 s)时,它会跳跃。将此阈值设置在0.75到1.0的范围内。当归一化强度超过此范围时,可以确定压力机的存在。为了简化色度的表示,从透明核心输出的RGB强度中提取了色相值(图4B)。色调表示使能够定位被按下的区域。压制期间施加的力的大小也与此色度值定性地成比例。当食指在多个位置弯曲时,能够实时重建外部压力机的位置和大小(图4C)。
相关文章
基于二氧化硅的分布式光纤传感器(DFOS)系统已经成为检测不可扩展结构中的应变,压力,振动,加速度,温度和湿度的强大工具。但是,DFOS系统与与软机器人和可伸缩电子设备相关的大型应变不兼容。康奈尔大学华人学者Hedan Bai,Shuo Li和Robert F. Shepherd教授团队开发了一种由弹性体光导的平行组件组成的传感器,其中包含连续或离散的彩色图案。通过综合利用内部反射和吸收,可拉伸的DFOS可以区分和测量机械变形的位置,大小和模式(拉伸,弯曲或压制)。进一步展示了通过可伸缩DFOS集成的无线手套进行的多位置解耦和多模式变形解耦,该手套可以同时重新配置所有类型的手指关节动作和外部按压,而仅需一个传感器即可实时进行。刊发相关题为‘‘Stretchable distributed fiber-optic sensors’’的论文在11月《Science》上。
作者提出了一种多功能可拉伸光机械传感器,将其称为可拉伸DFOS,其灵感来自基于二氧化硅的DFOS。可拉伸的DFOS系统是具有嵌入式彩色图案的弹性光导的并行组件。作者设计了两种彩色染料图案,作为两种传统DFOS的类比:(i)连续梯度染料图案,可以获得单模变形的连续空间分辨率;(ii)离散的色块图案,可以用离散的空间分辨率测量和解耦多种变形模式。为了演示可拉伸DFOS的多功能性,该工作重点是采用离散色块图案进行设计,将其命名为可拉伸的多模态传感光导(SLIMS)。
图1 A和B显示了SLIMS的结构,该导光板由两个聚氨酯弹性体芯(一个在四个离散位置掺杂有吸收染料的染色芯和一个不带染料的透明芯)组成,该芯被有机硅包层隔开。白色发光二极管(LED)的一端耦合到染色芯。在另一端放置了两个红绿蓝(RGB)传感器芯片,一个耦合到染色的核心,一个耦合到透明的核心。光机械传感方法基于SLIMS中光传播的光路中由变形引起的几何变化。彩色染料通过吸收光的变化来提供波长选择调制。双芯结构允许沮丧的全内反射(TIR)。通过观察两个核心的色度和强度输出,可以确定变形的位置,大小和模式(图1C和视频1)。
图1 SLIMS。(A)打结的SLIMS图像。(B)SLIMS的示意图,显示了不连续的染色区域,侧线芯的设计及其与光源和颜色传感器的耦合。(C)SLIMS未变形,拉伸,弯曲和受压时的光学输出和射线图。
由于光导的横截面为毫米级,可见光(波长<700 nm)的波特性变得不重要。安装在染色芯输入上的白色LED的视角为110°,因此来自同一LED的光线也可以进入透明芯。掺杂的染料充当空间信息的颜色代码。因为染料图案的深度仅等于染色芯高的一小部分(在这种情况下为?),所以很少有光线可以以未变形的形态穿过染料。当未变形时,两个内核均具有白色输出。
当染色区域被拉伸时(射线图:见图1C,被拉伸),该区域中的光路长度增加,引起染料更多的吸收,并且输出光朝着相应的颜色变化。根据比尔-兰伯特定律,由于拉伸会增加两个核心的光路,因此两个核心的光输出强度都会降低。SLIMS的表征表明,随着任何单个染色区域的拉伸,在透明核中未观察到色度变化(图2A),而色度随增加而变化在染色芯中观察到饱和(图2D)。两个磁芯的输出强度都以对数刻度线性衰减(图2,G和J)。根据染色芯的衰减,SLIMS的应变灵敏度在150%的范围内落在2至5 dBε-1(其中ε为应变)内伸长。以0.5毫米的预应变获得了0.1毫米的分辨率(1%应变)。经发现,预拉伸可以提高传感器的分辨率,这与拉伸表征结果一致(图2J)。注意当拉伸黄绿色区域(YG)时的非线性强度响应(图2G)。
图2 SLIMS在不同变形模式下的表征。当SLIMS在染色区域中被(A)拉伸,(B)弯曲或(C)压制时,透明核的色度响应。当SLIMS被(D)拉伸,(E)弯曲或(F)压在染色区域时,染色芯的色度响应。当SLIMS被(G)拉伸,(H)弯曲或(I)压在染色区域时,透明芯的强度响应。当SLIMS被(J)拉伸,(K)弯曲或(L)压在染色区域时,染色芯的强度响应。
当染色区域处于弯曲状态(图1C,弯曲)时,染色核心中的大多数光线都可以穿过染料,从而导致输出颜色发生变化。某些不能满足临界角的彩色光线会从染色的核中逸出并进入透明的核中。但是,这些光线无法耦合到透明纤芯。因此,透明芯仍然输出白光。四个染色区域中的每一个弯曲到最大κ= 0.65 cm-1的曲率,作者测量了两个芯的色度和强度响应(图2,B,E,H和K)。色度图表明,弯曲时的颜色响应与拉伸响应类似:透明的芯输出保持白色,而染色的芯输出朝着弯曲的染料区域改变其颜色(图2,B和E)。拉伸和弯曲之间的区别可以通过比较透明芯的强度输出来实现,因为强度在弯曲中基本不受影响(图2H),而在拉伸中则显着衰减。利用染色芯的衰减(图2K),SLIMS的弯曲灵敏度计算为7至24 dB·cm-1。
作者将SLIMS集成到3D打印的柔软手套中,每个手指仅使用一个定制的SLIMS,该SLIMS可以同时捕获三个手指关节的本体感觉和外部按压的外部感觉。手指的近端,中部和远端分别被离散的红色,蓝色和绿色染料覆盖(图3A)。
图3 SLIMS集成的软手套和多关节弯曲的本体感觉。(A)带有LED光源和电子模块的SLIMS集成式柔软手套的图像。(B)在五个不同的多接头弯曲配置下,两个芯的实时归一化强度数据。(C)用于多关节弯曲解耦的矢量和模型。(D)单接头弯曲测量。(E)两节弯曲测量。(F)三关节弯曲测量。(G)使用我们得出的矢量和模型实时重建多关节弯曲。
对于本体感受,首先从食指以不同关节角度组合弯曲时从两个核心收集RGB强度的原始数据(图3B)。当近端或中间关节只有一个弯曲(很难仅弯曲远端关节)时,染色芯会立即从白色变为红色或蓝色。可以确定该弯曲的位置和角度。但是,当多个折弯共存时,作者观察到了来自折弯区域的颜色混合。因此,需要建立一个数学模型,以消除融合在色度和强度响应方面的差异(图3C)。当仅弯曲单个关节时,首先在SLIMS中测量染色的芯响应,然后对所有三个关节重复此测量。为了分离强度和色度响应,作者将RGB强度输出转换为CIE xyY颜色空间(图3D)。图3G和视频4显示,手套实时执行三个手指关节运动的解耦和重建。
图4 SLIMS集成的软手套去耦结合了本体感受和外在感受。(A)在0到30 s内,在不同接缝上弯曲和加压时,两个纤芯的实时归一化RGB强度。压力检测的阈值由灰色框表示。(B)在0到30 s的相同变形下,从归一化RGB强度得出的实时色相值。彩色框显示确定按下的关节的色相值。(C)结合本体感觉和外部感觉的实时重建。
对于同时进行的外在感受,通过设置透明芯的归一化强度输出的阈值来实现外部按压与弯曲的解耦(图4A)。仅在弯曲(0至10 s)的情况下,强度会略有衰减;当在不同关节上多次按压SLIMS(10至30 s)时,它会跳跃。将此阈值设置在0.75到1.0的范围内。当归一化强度超过此范围时,可以确定压力机的存在。为了简化色度的表示,从透明核心输出的RGB强度中提取了色相值(图4B)。色调表示使能够定位被按下的区域。压制期间施加的力的大小也与此色度值定性地成比例。当食指在多个位置弯曲时,能够实时重建外部压力机的位置和大小(图4C)。
最新资讯
 Teledyne e2v独特的5D图像传感器可提供实时2D视觉和3D深度数据
Teledyne e2v独特的5D图像传感器可提供实时2D视觉和3D深度数据- 高速量子光载射频通信研究取得进展
- 中科院上海微系统所在薄膜荧光传感器研究方面取得进展
- 西工大研发超稳健应变传感器,推进软体机器人运动感知和自主巡航
- 住友电工发表石英玻璃光纤低损耗技术的最新研发成果
- 星曜半导体国内首发两款TF-SAW双工器,满足5G手机的高速率需求
- 科达嘉车规级大电流电感VSBX系列,高效提升汽车DC-DC转换器效率
- 科达嘉推出2合1车规级数字功放电感VSAD系列,助力汽车音响音质提升
- TFLN 技术加持,联特科技 800G 光模块助力数据中心降本增效
- 英诺迅发布新品1~1.8GHz 10W宽带集成功率放大器
